One of the books that made an impression on me as I was growing up in the 1970s was C. S. Forester’s Sink the Bismarck! Although it wasn’t the most factual account of the destruction of the the great German battleship, it did spark a life-long interest in me in Second World War naval warfare.
My other great interest while I was growing up was maps. That interest I eventually turned into a satisfying career.
Ten years ago I was surfing around the Internet and came across uboat.net, a detailed and thorough site that lists all of the ships sunk by German u-boats and their locations as well as the u-boats themselves. The site is great but the focus I found to be too limiting. U-boats played a major role in the Battle of the Atlantic but did not account for all the shipping losses in that theatre. Where were the ships sunk by mines or bombs or shells? Or, for that matter, what about the rest of the war, especially the naval war in the Pacific?
I looked about the Internet and quickly realized that no such database and/or map existed. There was a rather unsatisfactory map of World War II shipwrecks produced by SeaAustralia but it was grainy and static. Clearly, if I wanted to see such a map, I would have to create it.
And so I embarked on a project of mapping all of the ships sunk during the Second World War as a result of military action (i.e. no accidental sinkings). After 8 years of research I came up with a database and an interactive map that contained over 13,000 records. Since I published this mapping application in 2020 I have continued to research the Internet and hard copy sources for the locations of the 5,000 records for which I did not have location. This has continued to yield results and I have been able to add another 800 or so locations to the map.
Take some time with the mapping application and look up your favourite ship or location. There are bound to be mistakes so let me know if you find any.
Return to this site to learn of updates and other Second World War naval warfare maps.
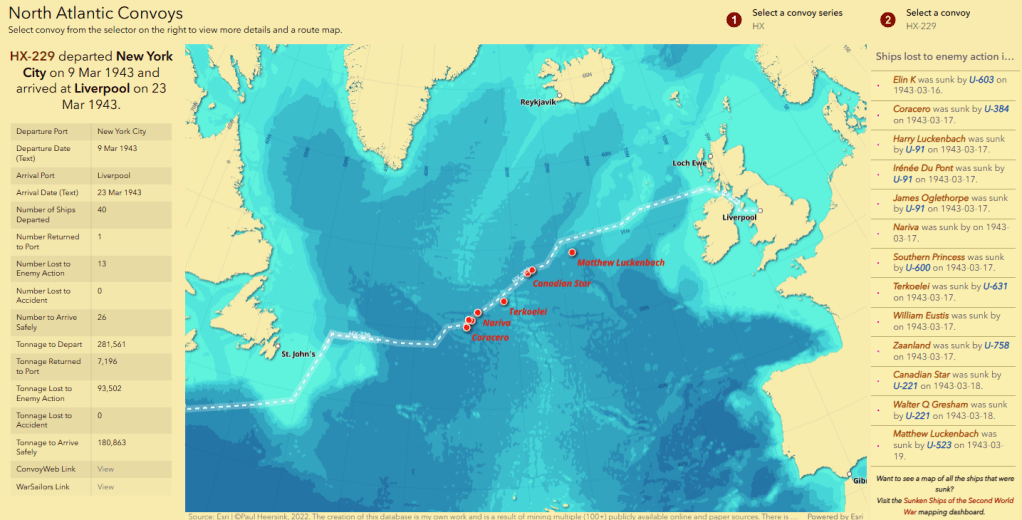
Convoy HX-229 departed New York City on 8 March 1943 with 40 merchant vessels and arrived in the UK 15 days later with only 26. One ship returned to New York City early on in the voyage and the other 13 were lost along the way, sunk by German U-boats. Along with the slower SC-122 convoy that left New York City 3 days earlier and lost 9 of its 51 ships, HX-229’s passage across the North Atlantic marked a low point in Allied fortunes in the North Atlantic battleground. Books (1, 2) have been written on the battles surrounding these two convoys and maps of their routes are easy to find online, including ones that are incorrect. Location and timing is crucial for the success of participants in any battle and providing maps showing these locations and their times is helpful in understanding how the battles of convoys HX-229 and SC-122 unfolded.
An Allied convoy near Iceland, 1942
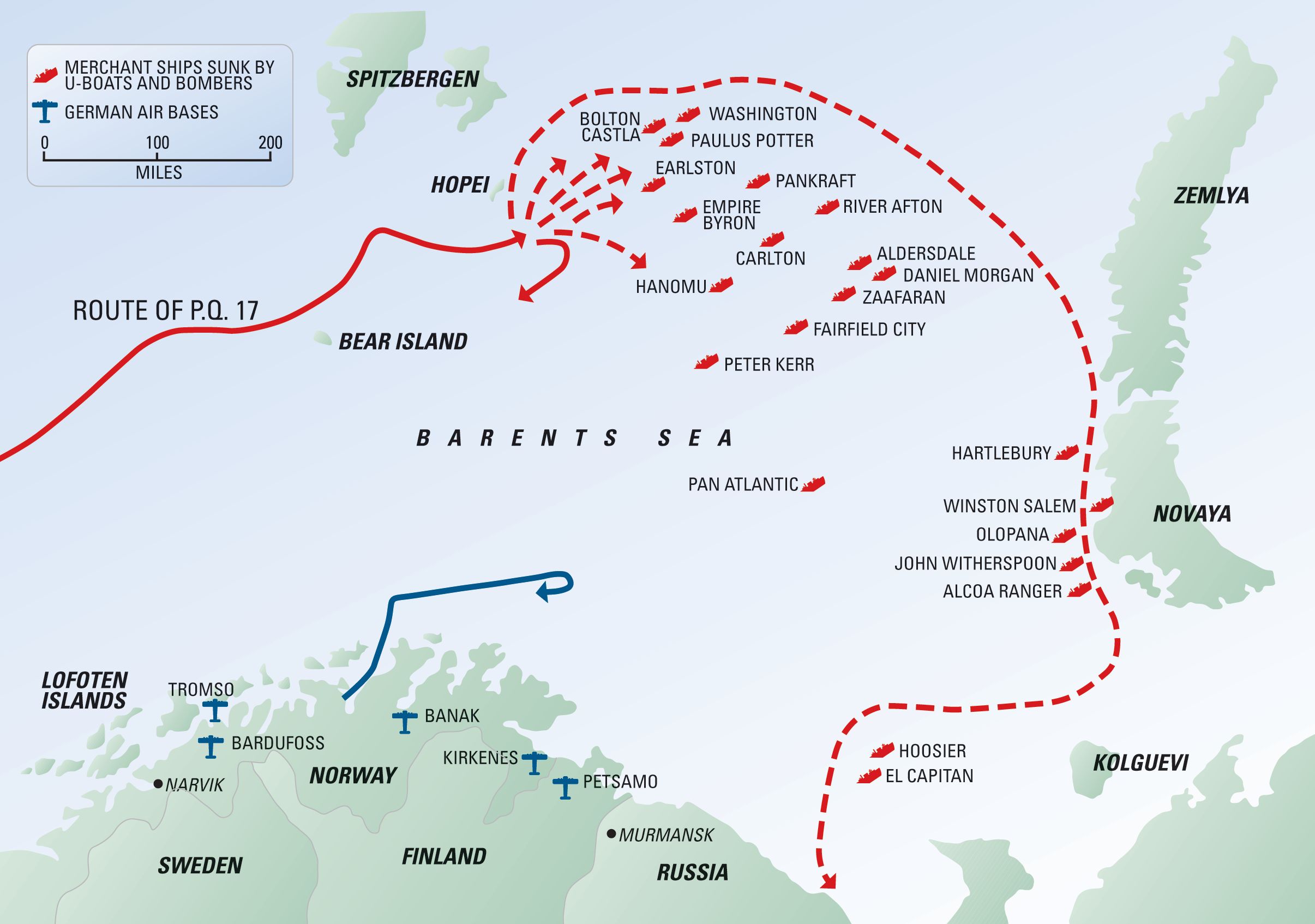
Other convoys that lost multiple ships have also been mapped and described. Convoy PQ-17, for instance, sailed for the Russian port of Arkhangelesk from Iceland in June/July 1942, lost 23 of its 35 merchant vessels to German U-boats and aircraft, and has also been written about (1, 2) and mapped (1, 2). But the majority of convoys have passed into obscurity.
This is not surprising as there were over 18,000 Allied convoys during the Second World War. Most of these convoys sailed undisturbed and arrived at their destinations unscathed. Of the 364 convoys that sailed as part of the HX series of convoys between September 1939 and May 1945, for instance, 299 did not lose any ship to Axis forces. In fact, close to 96% of the ships that sailed in these convoys arrived at their destination. Most of the ships that did not make the trip returned to the port of their origin due to mechanical or other issues. Less than 1% – 179 – of the 18,566 ships that sailed as part of an HX convoy were sunk due to enemy action. (Numbers have been compiled from Convoyweb).
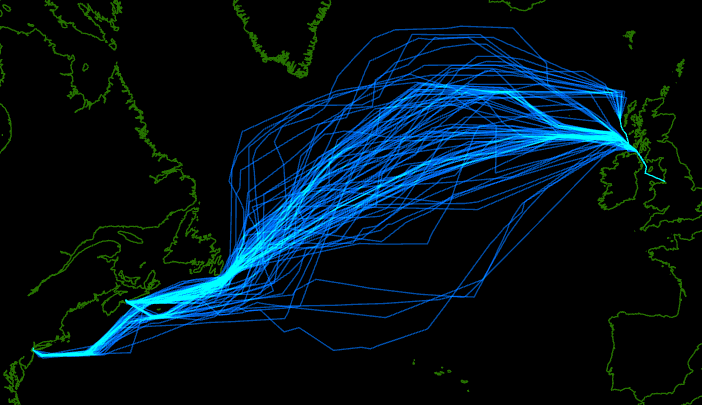
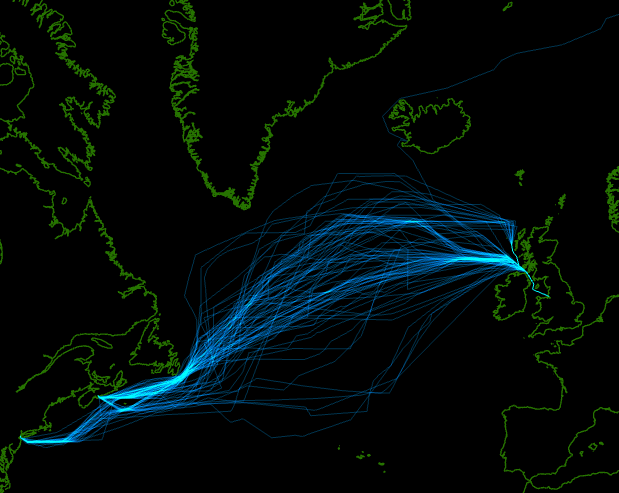
Maps for most convoys are difficult to find. This is understandable since most convoys arrived safely at their destinations without incident. But, though the maps of single convoys that had no losses might be somewhat mundane and dull to look at, collectively the alignment of their routes may tell a story.
The World War II Convoy Atlasis a collection of convoy maps in an interactive dashboard. Included in the Atlas so far are the routes of 100 convoys. Aside from the maps, the dashboard includes summary information on each convoy and a listing of any ships that were sunk along its route. Though there were 18,461 Allied convoys that sailed during World War II I don’t expect to be mapping them all. But do expect to see the number of convoys mapped increase over the next few months.
Included on the map are the following convoy routes:
Much of the mapping information that is included in the Atlas comes from a single source I have recently discovered: the Royal Canadian Navy: Convoy Reports of Proceedings, 1939-1945. This collection includes messages between Canadian naval headquarters and the convoy commanders, convoy reports and maps on which both the planned and actual route of the convoy were plotted. This collection of wartime documents was captured on microfilm, after which the originals were destroyed. Library and Archives Canada has since digitized and published the microfilm.
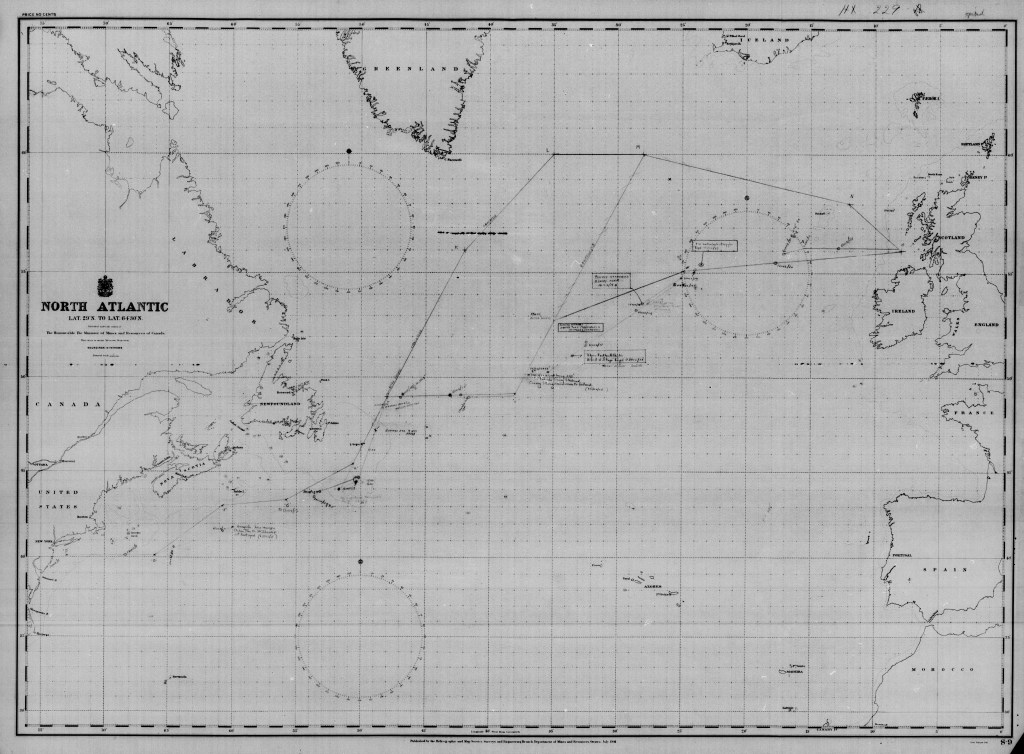
The route map of Convoy HX-229. This sheet is the typical North Atlantic sheet used to record the trans-Atlantic convoys, probably has a scale of 1:8,000,000 (the numbers are difficult to read) and probably is about 107 cm (42 in) wide by 84 cm (33 in) high. Source: Library & Archives Canada
The collection contains over 223,000 images in 42 reels. There is no index to the images and the images are not searchable so finding specific content in the collection can be a challenge. The convoy maps, conveniently, appear in last 5 reels of the collection (C-5542 to C-5546). A complete list of the convoys mapped is provided the in table at the end of this post. The maps were published by the Hydrographic and Map Service in the Canadian government’s Department of Mines and Resources and were used by both merchant and naval vessels. The most common maps in the collection is one depicting the North Atlantic (example in the figure above) and one that depicts Atlantic Canada (see figure below). Captains and crewmembers would plot the expected route and the actual route, with dates and times. Sometimes additional notes were recorded to indicate events.
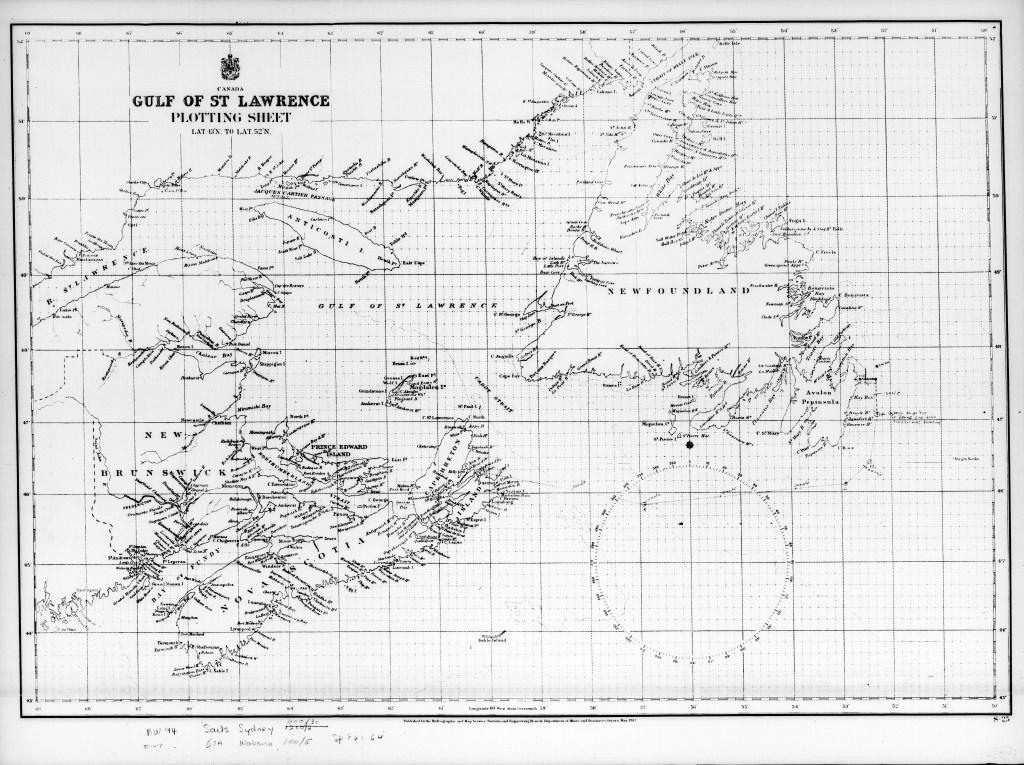
The route map of Convoy BW-94. This is the standard Gulf of St. Lawrence map that was used to plot the route of coastal convoys in and around Atlantic Canada and Newfoundland. The scale and size of this map is unknown. Source: Library and Archives Canada.
Putting the Atlas Together
Creating the convoy data required the published maps in the Collection to be imported and geo-referenced before they could be digitized. Summary information compiled from data published on ConvoyWeb was added to the appropriate record. The Sunken Ships database was added to a map. Since it shares a common data field with the convoy data, both could easily be incorporated into an interactive dashboard. This could easily have been done in one dashboard – an initially was.
But I split up the Atlas into 3 pages and, much like a paper atlas, each page focuses on one area or theatre of operations. Each map has its own map projection – one that is more suitable to the area of interest than the usual Web Mercator. This was especially true for the Arctic convoy map where east – west distances are grossly distorted in Web Mercator. Because the content of my map was fairly simple to begin with and because I didn’t need the wealth of information that comes with a standard basemap, I could dispense with the usual Web Mercator projection.
Instead I cached one single layer – my bathymetry data (from Natural Earth) that happened to draw faster in cached format anyway – in the projection I selected for the map. Because I had three different maps, each with a different projection, I had to do this 3 times. The caching time is quick and the storage required to host the cache is minimal so this was not onerous.
The maps for each theatre were placed in their own dashboards and each dashboard was given its own page within an ArcGIS Online Experience Builder app. As an introduction, a StoryMap was created and placed on the first page. Because of the flexibility of the Experience Builder app, it can be easily expanded to include additional content and enables a stable url regardless of the content changes within it.
Not a good day for HX-229
Index to the Library & Archives Canada convoy map collection
Updates have been light as I’ve been focusing on mapping convoy routes. I hope to create an interactive mapping application to display this content in the near future. Below are 92 mapped convoy routes. Most of these are from the HX convoy series in 1941 -1943.
The following changes were made to the database in May:
5 records was moved to a better location
16 records were edited
2 records were deleted
11 records were added
The following vessels were added to the map:
Bankura: a 3,185-ton Italian cargo ship, bombed and sunk on 21 April 1941 in Tobruk harbour.
Caldea: a 2,703-ton Italian cargo ship, torpedoed and sunk by HMS Taku off the coast of Libya on 13 July 1941.
Laura C: a 6,181-ton Italian cargo ship sunk off the toe of Italy on 3 July 1941. The ship was sailing from Messina with supplies for the Italian armies in North Africa when it was torpedoed by HMS Upholder.
Liguria: a 15,354-ton Italian liner initially damaged in Tobruk harbour in a July 1940 bombing raid, subsequently bombed and sunk on 22 January 1941. The ship was salvaged after the war.
Mar Bianco: an 8,443-ton Italian cargo ship, bombed and sunk on 7 December 1943 while at the quay in Zadar, Croatia (Yugoslavia at the time of the incident).
Piave: a 3,229-ton Italian cargo ship scuttled at Assab on 10 June 1941. Six other ships were scuttled by the Italians at the same time before the Allies captured the port the next day. Not all of these are on the map.
Remus Lepri: a Romanian gunboat sunk off the mouth of the Danube River on 11 January 1941 after striking a mine.
S-6: a Russian submarine sunk of the Swedish island of Öland on 30 August 1941 after striking a mine. The wreck was found in 2012.
Salpi: a 2,710-ton Italian cargo ship, sunk off the southeast of Corsica on 9 February 1942 after striking a mine.
Tanjong Katang: a British auxiliary patrol vessel, sunk by Japanese gunfire in Singapore on 9 February 1942.
Trang: a 205-ton British whaler operating out of Singapore when the Japanese attacked the city. The boat was set on fire and abandoned on 14 February 1942 during the Allied evacuation.
Italian cargo ships Liguria (right) and Bankura (left) sunk in Tobruk harbour in 1941 bombed by RAF aircraft on two separate occasions.



{kind=link}
{kind=link}